Digital Library of Zielona Góra contains 9 465 digital objects
Object
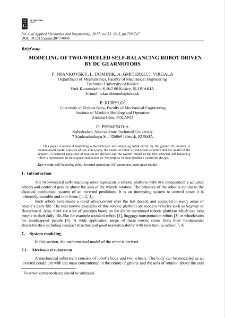
Title: Modeling of two-wheeled self-balancing robot driven by DC gearmotors
Creator:
Frankovský, Peter ; Dominik, L. ; Gmiterko, Alexander ; Virgala, Ivan ; Kuryło, Piotr ; Perminova, O.
Date:
Resource Type:
Contributor:
Group publication title:
Abstract:
Publisher:
Zielona Góra: Uniwersytet Zielonogórski
Format:
Resource Identifier:
DOI:
Pages:
Source:
IJAME, volume 22, number 3 (2017)
Language:
License:
License CC BY-NC-ND 4.0:
Rights:
Biblioteka Uniwersytetu Zielonogórskiego
Object collections:
- Repository > Faculties > Faculty of Mechanical Engineering
- Repository > Types of work > Articles
- Repository > Scientific journals and UZ publishing series > International Journal of Applied Mechanics and Engineering (IJAME)
- Repository > Scientific journals and UZ publishing series > International Journal of Applied Mechanics and Engineering (IJAME) > International Journal of Applied Mechanics and Engineering (IJAME) (2017)
Last modified:
Jul 6, 2023
In our library since:
Apr 5, 2023
Number of object content hits:
690
All available object's versions:
https://zbc.uz.zgora.pl/repozytorium/publication/80373
Show description in RDF format:
Show description in OAI-PMH format:
| Edition name | Date |
|---|---|
| Modeling of two-wheeled self-balancing robot driven by DC gearmotors | Jul 6, 2023 |
Objects Similar
Frankovský, Peter Virgala, Ivan Hudák, P. Kostka, Ján Jurczak, Paweł - red.
Frankovský, Peter Delyová, Ingrid Trebuňová, Marianna Čarák, Peter Kicko, M. Kurylo, Piotr Jurczak, Paweł - red.
Cyganiuk, Joanna Kuryło, Piotr Jurczak, Paweł - red.
Kelemen, Michal Colville, Daniel John Kelemenová, Tatiana Virgala, Ivan Miková, L'ubica Jurczak, Paweł - red.
Abdelrahman, Mostafa Aryassov, Gennady Tamre, Mart Penkov, Igor Jurczak, Paweł - red.
Delyová, Ingrid Frankovský, Peter Bocko, Jozef Sivák, Peter Kurimský, R. Jurczak, Paweł - red.
Ciężkowski, Maciej Jurczak, Paweł - red.
Delyová, Ingrid Hroncová, Darina Frankovský, Peter Sivák, Peter Kostka, Ján Neumann, Vojtech Jurczak, Paweł - red.